from my old site... Nonlinear Plant
This post still recovers some content presented in my last website.
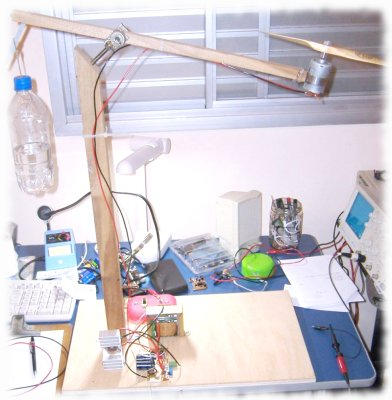
I needed a plant (system) to practice some digital control concepts. That would be too easy. So I decided to have a nonlinear one. Therefore, it would be possible to train with system identification, control, adaptive control, (sub)optimal control, and so on.. That was the idea: